活用例
もっと活用!LiDARスキャナ 第4回【LiDARと固定式スキャナで取得したデータの合成のコツ】

第2回、第3回ではLiDARスキャナアプリを使った測定のコツをご紹介しました。第4回では、その後の工程「データ合成」のコツをまとめます。
アルモニコスでは、LiDARスキャナアプリ(Sakura3D SCAN)の活用法の1つとして、固定式スキャナーでの測定が難しい箇所の補完を提案しています。
「固定式スキャナーでの測定が難しい箇所」とは、設備やレイアウトが入り組んでいてスキャナーを設置しづらい箇所になります。
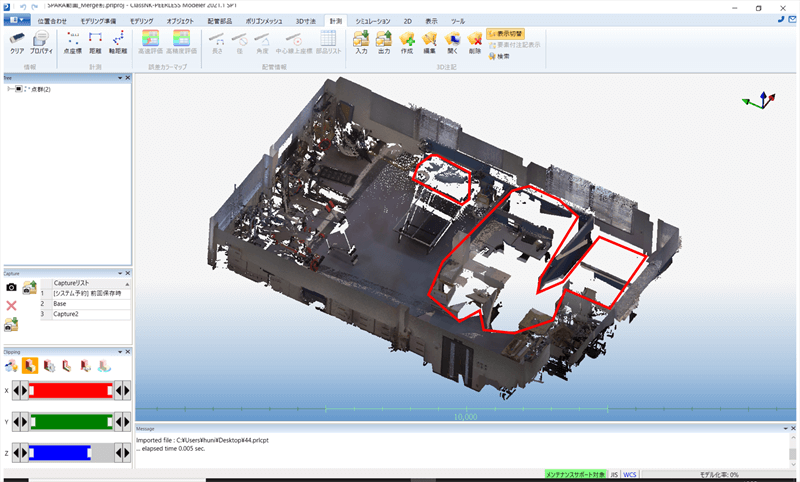
今回の調査では、次の画像内の赤枠の部分を、入り組んでいる場所と仮定してトライしてみました。
部屋の大部分は固定式スキャナーで測定し、赤枠部分はLiDARスキャナで測定し、2つのデータを合成して1つにしていきます。
なぜデータ合成(位置合わせ)が必要なのか?
コツをご紹介する前にまず、そもそもどうして点群測定後にデータ合成作業が必要になるのかをご説明します。
iPhone/iPadで点群を測定する場合では、ハードウェアのスペックの都合上、1回のスキャンで取得できる点群数に限りがあります。もちろん固定式スキャナーには到底及びません。
これにより、測定対象がある程度の大きさ・広さを持つ場合、ショット数(スキャン回数)を増やして測定することになります。
スキャナアプリの特性上、ショットごとの測定スタート地点が原点となってしまいます。そのため各々位置がずれた状態で複数のショットが取得されます。
こういった理由から、点群処理ソフト等でデータ合成(位置合わせ)の作業が必要となるのです。
調査1:点群処理ソフトを使って位置合わせ
ここでは、次のようなデータとソフトを使って調査しました。
- Sakura3D SCANで測定し出力した点群データ
- 固定式レーザースキャナで測定し出力した点群データ
- 弊社所有の他社製点群処理ソフト
上記の他社製点群処理ソフトには自動位置合わせ機能があるので試してみたところ、できませんでした。
iPhone/iPadから出力した点群は、精度が低く厚みを持っているため、点群処理ソフトによっては位置合わせができないこともあります。恐らく今回はそれが原因ではないかと考えられます。
手動位置合わせへ手法を変えたかったのですが、この点群処理ソフトには担当者もあまり詳しくないため、慣れているものに変えました。次の調査に続きます。
調査2:ClassNK-PEERLESSで手動位置合わせ
ここでは、次のようなデータとソフトを使って手動の位置合わせをしてみました。
- Sakura3D SCANで測定し出力した点群データ
- 固定式レーザースキャナで測定し出力した点群データ
- 大規模点群処理ソフトClassNK-PEERLESS
担当者が慣れているためClassNK-PEERLESSを使いましたが、お持ちの点群処理ソフトを使う場合でも参考にしていただけるコツになります。
コツ1:位置合わせの前に…
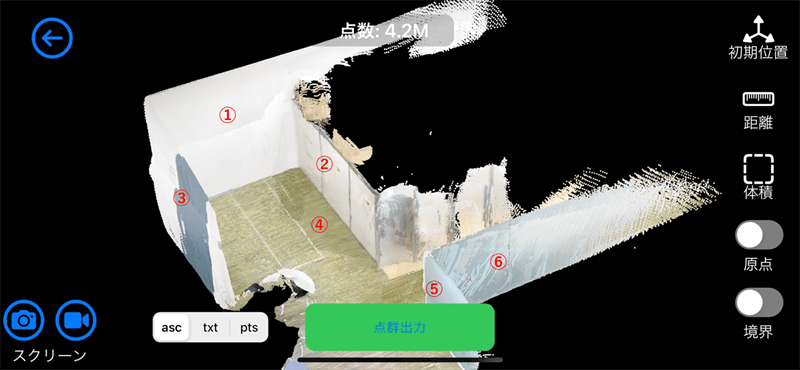
まず、手動位置合わせの方法で、最も簡単なのは3平面を基準で合わせる方法になります。この方法を効率よく行うためには、1ショットごとに3平面以上入るようにスキャンすることがコツになります。
測定の際は次の画像のように、なるべく平坦な箇所を多く撮ってみてください。
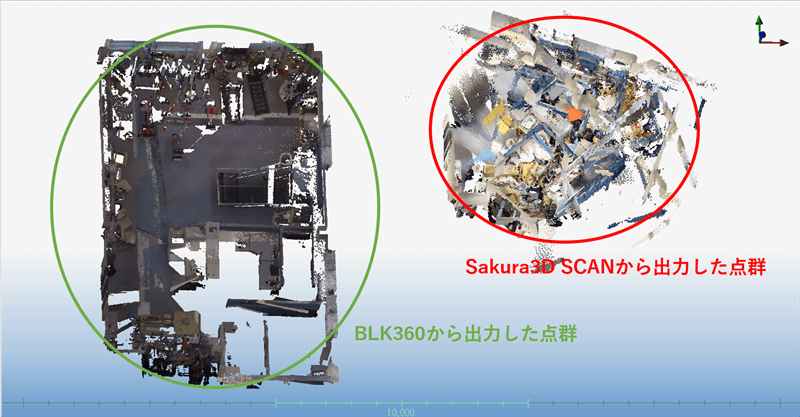
コツ2:基準となるデータを決める。
この時、ショットの中で精度が良く、広く測定されている点群データを基準とすることがコツです。一般的には、iPhone/iPadで測定した点群データよりも、固定式スキャナーで測定した点群が適しています。固定式スキャナーで測定・出力した点群データを基準にしましょう。
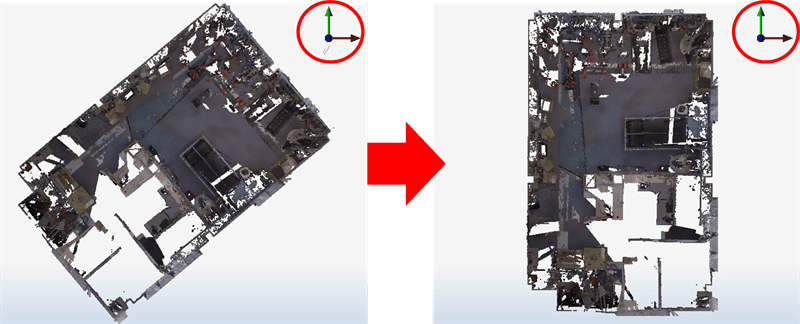
コツ3:基準となる点群データを、位置合わせソフト(今回はClassNK-PEERLESS)に読み込んだら、XYZの軸を合わせます。これにより、軸がずれていた場合に生じるビュー操作や形状確認の難しさを防ぎます。
次に、iPhone/iPadで測定・出力した点群データ(今回はSakura3D SCAN)を読み込みます。
手動の位置合わせ機能を使って、位置合わせをしていきます。
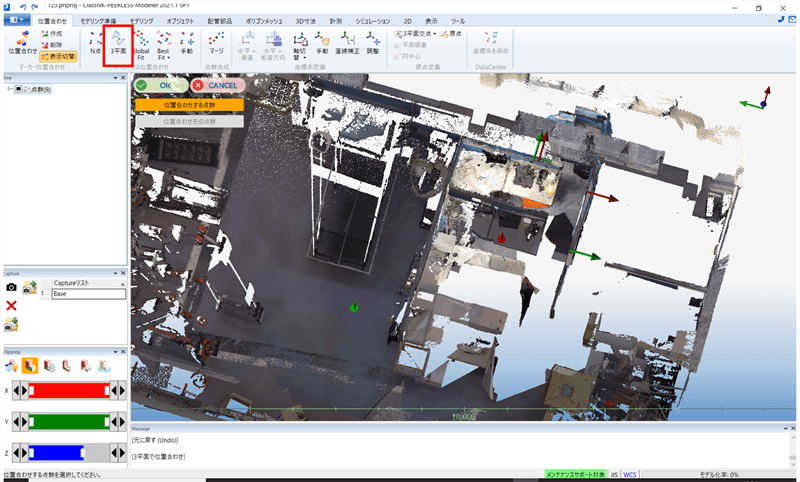
『3平面』という、指定した2つのショットを3つの平面を指定して位置合わせをする機能を使いました。
コツ4:位置合わせを行ったら、必ずショットごとの確認作業をしてください。手動の位置合わせにはミスが伴いやすいので、ショットごとに確認をして防ぎます。
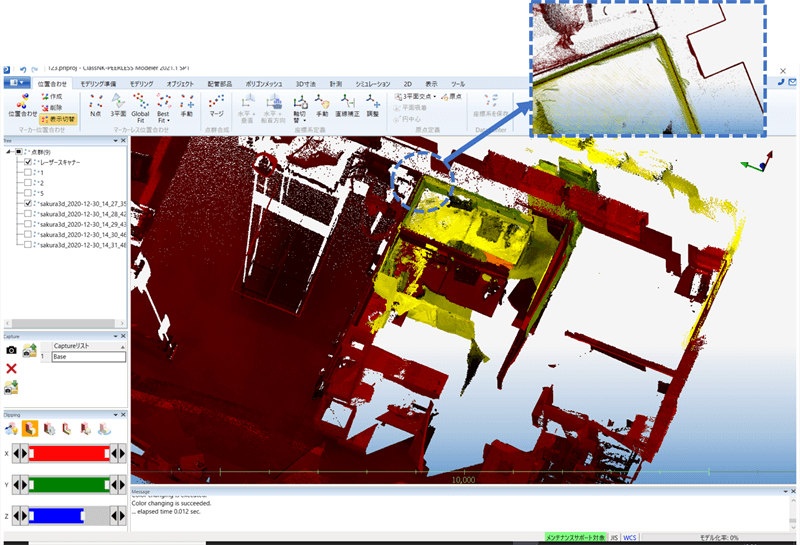
(ClassNK-PEERLESSでは、ショットごとに異なる色で点群を表示できるため、目視でずれ具合を確認できます。)
作業を繰り返し、全体の位置合わせを行います。
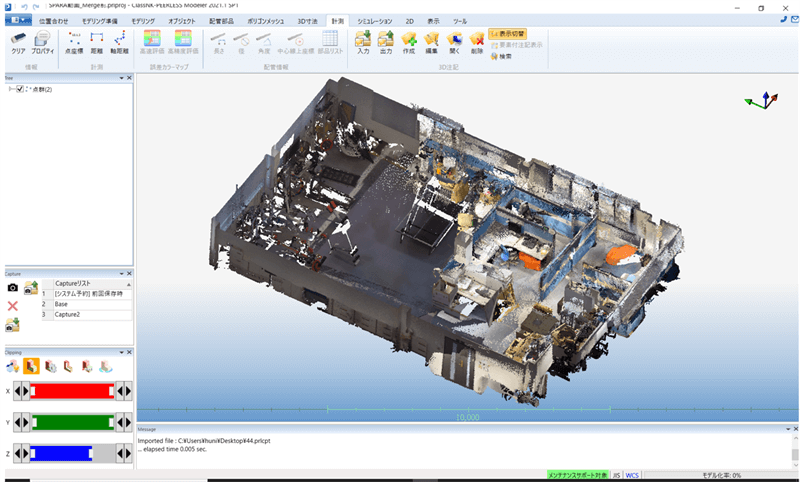
いかがでしょうか。始めに赤枠で囲んでいた部分が補完されて1つのデータになっています。
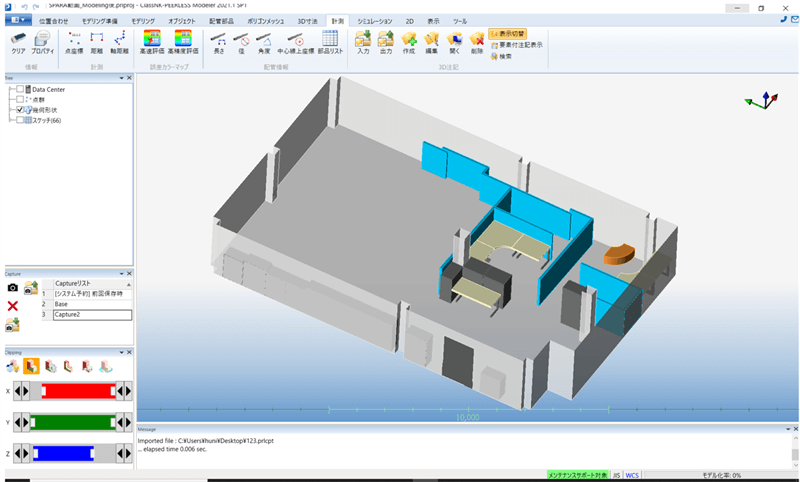
おまけ
データ合成後からリバースモデリングした結果が次になります。
まとめ
iPhone/iPadで測定した点群データと固定式スキャナーで測定した点群データの合成のコツを以下にまとめました。
- 1ショットに3平面以上入るように測定を行う。
- ショットの中で、精度が良く広く測定できている点群データを位置合わせ基準とする。(固定式スキャナーから出力した点群データ)
- 位置合わせを行う前に、基準データのX・Y・Z軸を合わせておく。
- ショットごとの結果を確認しながら位置合わせを行っていく。
最後に注意点があります。
LiDAR由来の点群データと固定式レーザースキャナーの点群データは精度が大きく異なります。LiDARではcm単位、固定式ではmm単位というレベルの差があると考えてください。今回のようにモデル化した場合、それぞれの部分の精度の違いから、ベースとして利用した点群により3次元モデルの再現精度に違いがあります。利用する際は目的に応じた選択をし、3次元モデルの活用を進めてください。
LiDARスキャナアプリの活用法の1つ、「固定式スキャナーでの測定が難しい箇所の補完」をご理解いただけたでしょうか。データ合成も測定と同じくコツがいりますが、慣れてしまえば便利かと思います。ぜひ、あなたの業務に適用してみてください。
投稿日:2021年10月27日
更新日:2022年02月24日

tag : LiDAR Sakura3D SCAN