機能
点群データのメリット・デメリット

弊社ソフトウェアを使用する際、なくてはならない存在の『点群』。近年では、プラント業界や建設業界でも注目されている画期的なデータです。その便利さが大きく取り上げられる一方で、慣れない点群データの扱いに苦労されている方々もいらっしゃると思います。点群データは取得段階・活用段階で、手計測データに比べて多くのメリットがありますが、もちろんデメリットもあります。点群データを上手く活用するためには、このメリット・デメリットを正しく理解し、自社にとっての最善策を見つけることが重要です。
本記事では、まず点群の基礎的な情報についてご説明します。その後、『ClassNK-PEERLESS』が点群データのデメリットをどのように解消しているのか、具体的な機能を交えてご紹介します。
点群とは?
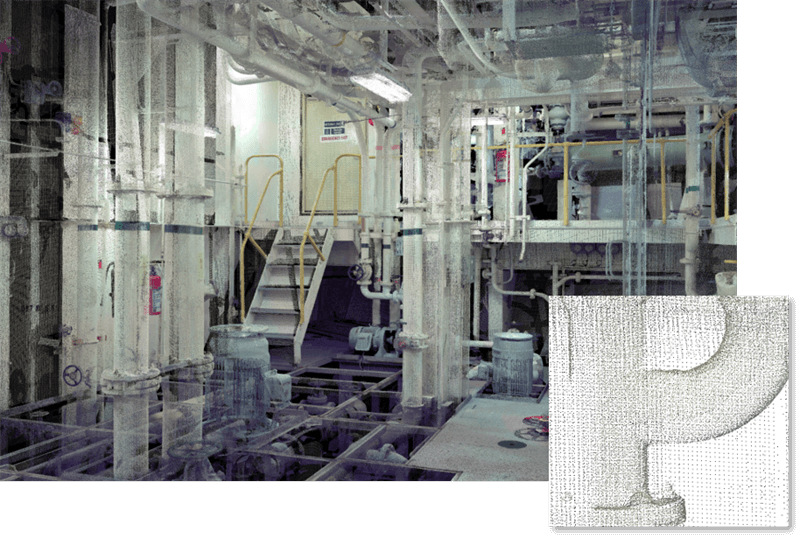
点群データとは、簡単に言うとレーザースキャナーなどで測定した点の集まりです。
以下の情報を保有しています。
- 座標値(XYZ座標)
- カメラ画像から得た色情報(RGB値)
- 反射強度(Intensity)
点群データを取得する方法は様々で、ザっと挙げるだけで以下のものがあります。
- 地上型レーザースキャナー(TLS)
- ハンディレーザースキャナーやLiDAR
- 移動体計測:ドローンや航空機、車載型移動計測システム (MM)
- 写真画像をSfM技術を使って点群化

点群のメリット・デメリット(手計測と比較した場合)
メジャー計測などの手計測と比較した場合のメリット・デメリットについて見ていきましょう。今回は、計測方法と成果物にフォーカスを当てていきます。


メリット
1. 計測を素早くできる(機種によっては容易にできる)
手計測の場合、箇所ごとに移動して、必要な箇所にメジャーを当てて数値をメモして…といくつかの工程が発生します。また、全て人の手で行うので、担当者により速度や正確さの違いも生じます。
レーザースキャナーで計測の場合、機種にもよりますが、必要な設定をした後、ボタン1つで自動でスキャンを行います。死角になっている部分を測定するためには、スキャナーの位置を何度か動かしてスキャンする必要がありますが、手計測よりは遥かに楽な作業になるでしょう。
2. 広い範囲を計測できる
手計測で広い範囲を計測したい時、それだけの時間や人手が必要になります。また、100mを超えるような範囲を計測するのは途方もない作業になるでしょう。
レーザースキャナーで計測の場合、一度のスキャンで、スキャナーの真下を除いた360度の範囲を計測できます。機種にも寄りますが、測定範囲は100mや300mを超えるものもありますので、手計測では現実的でなかった広範囲の計測も可能です。
3. 近寄らなくても計測できる
手計測の場合、高所や立ち入り禁止区域など、やむを得ず事故のリスクを背負いながら計測を行う場面があります。
レーザースキャナーで計測の場合、離れた場所でもスキャンすることができますので、安全な場所から計測が出来ます。
4. 計測結果は誰が見てもわかる
手計測の場合、計測結果は最終的に図面に記入するかと思います。この時、情報を共有できる範囲は図面を読める方だけに限られます。図面を読めない方(設計者でない方、新人の方など)が全て理解するのは難しいでしょう。
点群を使う場合、3次元的に空間を距離計測することができるため、図面の読めない方でも簡単に理解できます。視認性が良くなることも強みです。
5. データとしてすぐに活用できる
手計測で取得した寸法情報を元に3Dモデルを作成したり、図面に正確に反映するのは時間がかかり難しい作業になり、ヒューマンエラーの可能性も排除できません。さらに、測り忘れがあれば思ったように作業が進まない可能性もあります。
点群を使えば、点群を元に素早くモデル化が可能です。モデル化したものをCADに取り込み、検討時に使用できます。また、広範囲を360度測定できるので、測り忘れはほぼないと言えます。
デメリット
1. データ容量が大きくなる
「点群とは?」で記載したように、点群データは、座標値などの情報を持った1つ1つの点の集まりになります。スキャナーや測定方法にも寄りますが、1つのデータにおける点群量が、億を超えることは日常茶飯事です。そして当然、容量は大きくなります。こちらの記事では、弊社のデモ用データの容量を記載していますが、デモ用であっても軽くGBは超えています。実際に業務で皆さんが使われるデータとなれば、さらに容量が大きくなることは容易に想像できます。
そして、データ容量が大きくなることの弊害として、「データ共有が大変」・「システムへのインポートに時間がかかる」・「操作/処理が重くなる」・「扱うPCには一定のスペックが必要になる」、などの課題が挙げられます。
2. スキャナーが高価
最近では、iPadやiPhoneにもLiDAR機能が搭載され、費用的にも気軽に点群取得ができるようになりました。しかし、実務で使えるレベルの点群となると、それ相応のスキャナーを使用する必要があります。そういったスキャナーの場合は付属のソフトや補償も含めると、一千万円近く、もしくはそれ以上になることが通常です。
ClassNK-PEERLESSでの作業において、点群のデメリットを補完する機能
点群のメリット・デメリットを見ていくと、圧倒的にメリットの方が多いですが、デメリットである「データ容量が大きい」ことと「初期費用がかかる」ことは、これから点群の活用を検討する皆様にとって大きなネックになるのではないかと思います。
そこで、「データ容量が大きい」というデメリットを、『ClassNK-PEERLESS』がどのように扱って点群活用をしているのか、実際の機能をご紹介したいと思います。
「データ共有が大変」を解決する機能
モデリング機能
まずはClassNK-PEERLESSの主用途となるモデリングです。点群を3Dモデル化することで、単純にデータ容量を小さくできます。そのBefore/Afterの比較については、こちらの記事をご覧ください。
ClassNK-PEERLESSのモデリング機能は操作性・処理速度共に、特に強化していますので、モデル化によるデータ容量削減を簡単に実現できます。
実際の操作のイメージはこちらの動画をご覧ください。
使用済み点群/ 使用していない点群のレイヤ分け
モデル化でデータ容量が小さくなるといっても、その後の業務へのアウトプットとして、点群から作成したモデルだけを信用するのは難しい、というのが皆様の本音ではないでしょうか。
そういった声に応える機能が、「使用済み点群/ 使用していない点群のレイヤ分け」です。
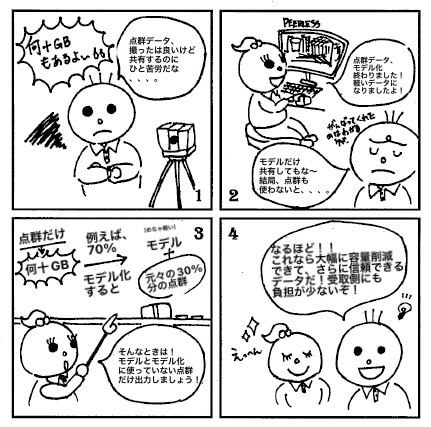
ClassNK-PEERLESSでは、作成したモデルの近傍にある点群(モデル化に使用した点群)と、そうでない点群(モデル化していない点群)を区別して、点群出力が可能です。
「点群から作成した3Dモデル」+「モデル化していない点群」の状態であれば、データ容量はかなり削減され、信用できるアウトプットとして活用できます。
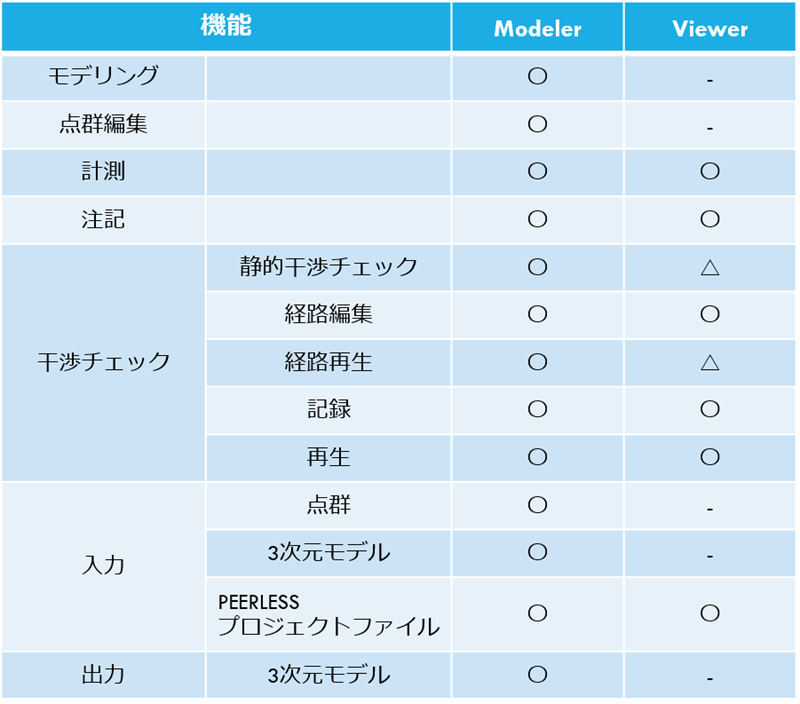
Viewer
ClassNK-PEERLESSにはライセンスフリーのViewerがあります。チームやお客様に配布して、点群とモデルデータを見てもらえるため、円滑なコミュニケーションが実現できます。具体的な機能は次の表をご覧ください。
なかでも、注記機能は便利です。注記情報のみ出力してやりとりできるため、画像キャプチャや図を書かなくても、スムーズにフィードバックや修正の指示を出すことができます。
Viewerと注記機能の使い方については、ユーザー様向けにわかりやすくご説明した記事がございますので、是非こちらをご覧ください(※ClassNK-PEERLESSユーザー様専用ページになります。ユーザー様でない方はご覧いただけません。)
「インポートに時間がかかる」を解決する機能
DataCenter
ClassNK-PEERLESSの保守締結ユーザー様には、『DataCenter』という大容量点群を管理するシステムをご使用いただけます。
通常、ClassNK-PEERLESSは20億点の点群までインポート・編集することが可能(使用するPCスペックにより10億点までの場合もある)です。そのため、20億点を超える点群の場合は事前に分割する必要がありますが、DataCenterを使えばその必要がありません。DataCenterへのインポートには点群数の制限がありません(PCの空き領域次第)ので、DataCenterへ一括インポート後、ClassNK-PEERLESSで編集できる範囲を設定してモデリングが可能になります。
DataCenterの使い方については、ユーザー様向けにわかりやすくご説明した記事がございますので、是非こちらをご覧ください(※ClassNK-PEERLESSユーザー様専用ページになります。ユーザー様でない方はご覧いただけません。)
PreProcessor
上記DataCenterを使っても、何十億点といった容量の大きい点群のインポートは時間がかかってしまいます。(弊社開発チームも処理高速化に向けて日々奮闘しております)
そんな時、PreProcessorを使えば、時間のかかる点群インポート・変換作業をバッチ処理で行うことができます。他の作業をしている間や夜間などに処理をかけておけば、DataCenterへの登録・モデル化のための点群変換・間引きやノイズ除去などの点群処理を完了できます。
PreProcessorの使い方については、ユーザー様向けにわかりやすくご説明した記事がございますので、是非こちらをご覧ください(※ClassNK-PEERLESSユーザー様専用ページになります。ユーザー様でない方はご覧いただけません。)
「操作/処理が重くなる」を解決する機能
使用済み点群のビュー上での非表示
「使用済み点群/ 使用していない点群のレイヤ分け」でもご説明したように、ClassNK-PEERLESSでは、作成したモデルの近傍にある点群(モデル化に使用した点群)とそうでない点群(モデル化していない点群)を区別しています。そして、デフォルト設定ではモデル化した点群はビュー上で非表示になります。
次の画像をご覧いただくと一目瞭然ですが、モデル化した点群が非表示になっていると、どこがモデル化済みで、どこが未着手なのかがわかりやすいという利点があります。
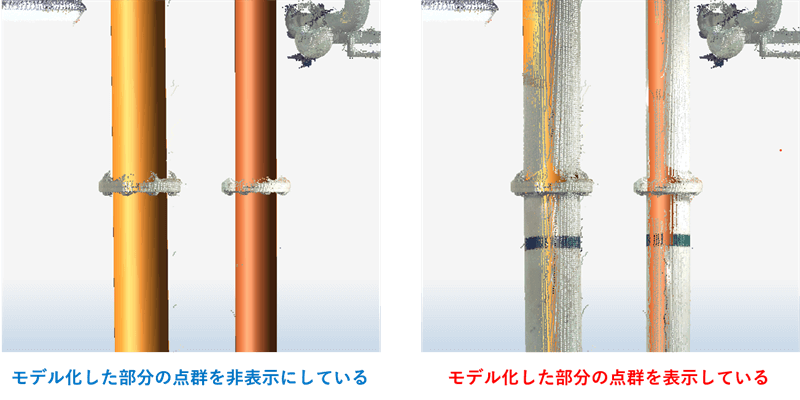
さらに、ビュー上から点群が非表示になっていくことで、モデル化すればするほどビュー操作の動きが軽くなっていきます。これにより、大容量の点群データで「操作/処理が重くなる」問題を解決しています。
まとめ
いかがでしたでしょうか?
点群の扱いについて、理解を深めるのにお役に立てば幸いです。
画期的なツールとして、今後もさらに活用の場が広がりそうな点群データですが、完全に万能というわけではありません。これから導入を検討されている方々や、社内の点群活用の在り方を見直したいと考えている皆様には、点群データのメリット・デメリットをご理解いただき、いかに上手くデメリットと付き合い、メリットを享受していくか、自社にとって最善の方法を探っていただけたらと思います。
その際は、弊社もお手伝いいたしますので、ぜひお気軽にご相談ください。