活用例
もっと活用!LiDARスキャナ 第2回【LiDARスキャナアプリでなるべく“使える”データを撮るには?Part 1】

低コストで手軽に測定し、点群・ポリゴンデータを取得できるiPhone/iPadのLiDARスキャナ(ライダースキャナ)。ですが、やはりまだまだ精度はそれなりで、用途によっては使えそうにない…なんてことも。
そこで今回は、iPhone/iPad のLiDARスキャナを使った3D測定アプリで、なるべく精度の良い、後工程で使えるデータを取得するにはどうすればよいのかを検証してみました。
もちろん「なるべく」ですので、いきなり高価な測定機器と同等の結果を期待するものではありません。
ですが、測定の手軽さを考えると、試してみる価値は十分にあると考えています。
iPhone/iPad に搭載されている LiDAR スキャナは、Time-of-Flight(ToF)方式を用いた深度センサーで、レーザー光の反射時間から距離情報を取得します。手軽に点群データを取得できる一方で、計測距離や精度にはセンサー仕様に起因する制約があります。
使用したのは、iPhoneと『Sakura3D SCAN』ですが、他の3D測定アプリでも同じ点に気を付ければ、何も気にしなかった場合に比べて幾分か結果が良くなるはずです。
調査項目
調査1:測定対象との距離
ここでは、大きく4つのエリアに分けて調査しました。
測定対象
結果の表は以下になります。
| 対象との距離 | ~0.3m | 0.3m~5m | 5m~7m | 7m~ |
|---|---|---|---|---|
| 結果 | 測定不可 | 最も適している | 扱いづらい | 測定不可 |
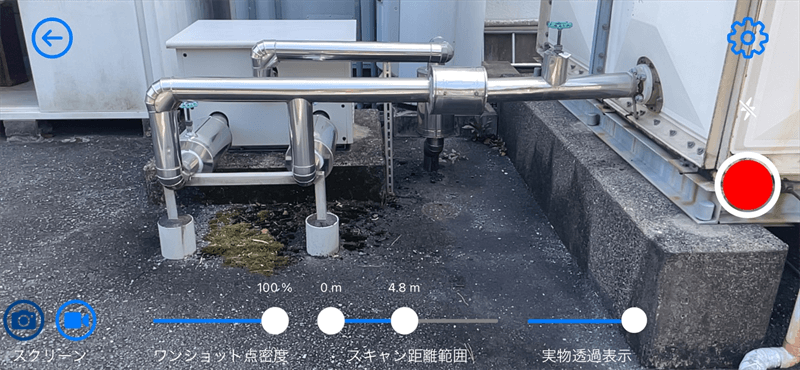
距離ごとの、測定結果画面は次のようになります。
~0.3m範囲
近すぎるため、対象が認識できていません。
対象物から15cm離れた時点で点取得は可能になりますが、ノイズが発生しやすく、ショットもずれやすくなりました。30cm以上離れると安定しましたので、最低でも30cmは離れた方が良さそうです。
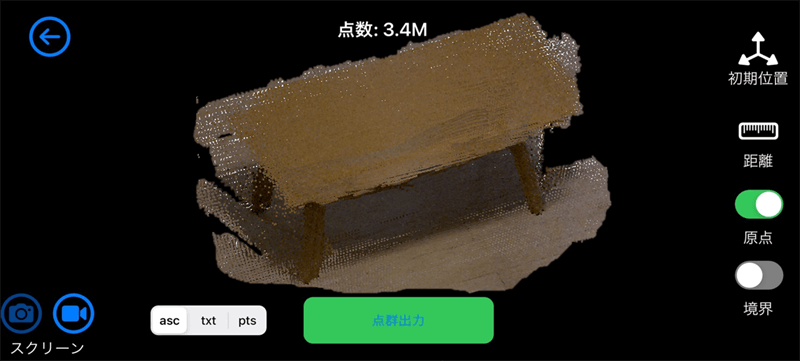
0.3m~5m範囲
対象がしっかりと認識できています。扱いやすい点群でした。
5m~7m範囲

測定可能な点群数が減る、内側に湾曲する形で誤差が発生する等、あまり信用できない結果となりました。
7m~範囲

遠すぎて、対象を認識できていません。
この調査の結果、0.3m~5mの範囲内で対象を測定した時が最も良い結果となりました。
5mを超えると点の取得が困難で、取得出来ても湾曲する形の誤差が発生するため、用途によっては実用には十分でない精度といえます。
これは、iPhone/iPad に搭載されているLiDARセンサーの計測距離が、おおよそ数メートル程度を想定して設計されているためです。計測距離が長くなるほど深度精度が低下する傾向があり、これはセンサー仕様に起因する特性といえます。
調査2:測定環境
ここでは、以下の2点に着目して調査を行いました。
- 場所(屋内 VS 屋外)
- 明るさ(明るい場所 VS 暗い場所)
屋内 VS 屋外
壁を対象に測定してみました。(測定した時間:8月、AM11時頃)


ここでは、特に目立った差はありませんでした。
どちらも結果に問題は無さそうです。
明るい場所 VS 暗い場所
電気を付けた状態と消した状態で比較しました。(測定した時間:8月、PM7時頃)

電気を消した状態の画像を見ると、暗い場所では測定出来なくはないですが、ノイズが増えたり、ショットが重なる傾向があります。
さらに真っ暗だと測定すら出来ませんでしたが、iPhoneのフラッシュライト機能を使えば測定出来ました。

結果、屋内外は特に関係なく、明るさについては、明るい場所の方が好ましいことがわかりました。
LiDARはレーザー光を用いた計測方式ですが、測定対象の表面状態や周囲の光環境によって反射光の受信状態が変化します。特に暗い環境や反射率の低い対象ではノイズが増えやすく、点群のばらつきとして現れる場合があります。
どうしても測定する環境が暗い場合、iPadやiPhoneのフラッシュライト機能を使って測定することもおススメです。
調査3:取得する点群の密度
ここでは、点群密度が低い場合と密度が高い場合を比べて、点群の密度の違いによる取り扱いの容易さを見ていきます。
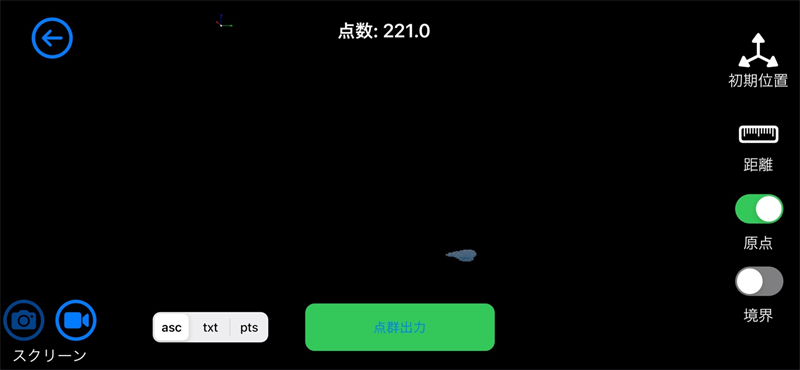
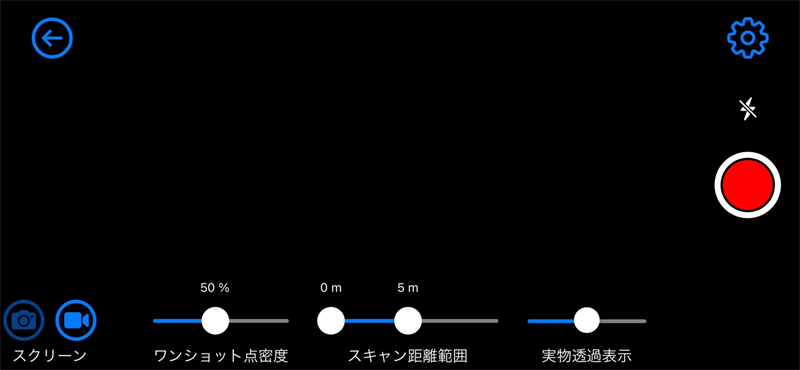
取得する点の数が少ない場合(密度が低い場合)
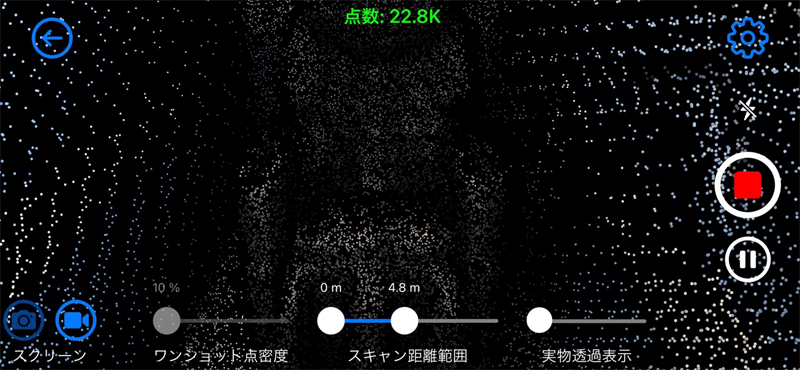
※数値の色が緑で、デバイス(iPhone12 Pro)メモリーに余裕があることを表しています。
画像からわかるように、以下の問題点があります。
・測定後の物を見ても形が分かりづらい
・1回の測定で測定できる点数が少ないので、時間をかけて測定しなければならない。
・時間をかけて測定するので、誤差が目立ちやすい
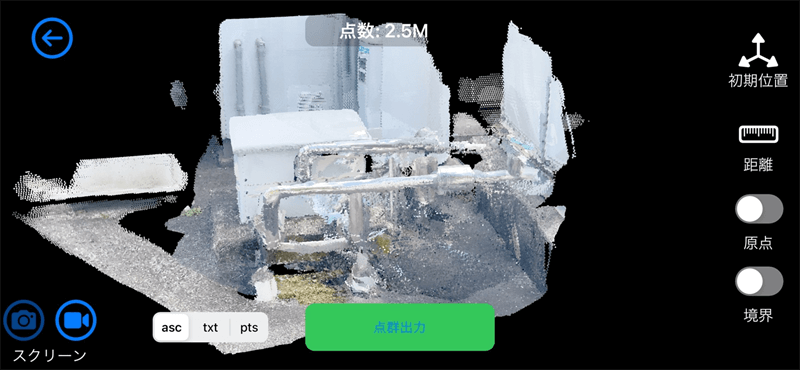
取得する点の数が多すぎる場合(密度が高すぎる場合)
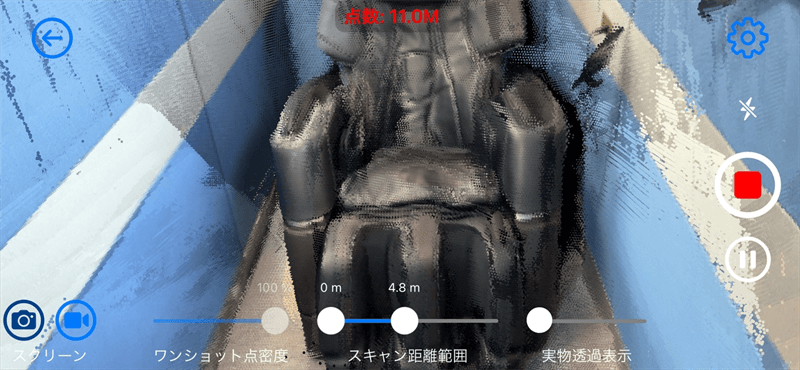
※数値の色が赤で、デバイス(iPhone12 Pro)メモリーに余裕がないことを表しています。
取得する点の数が多すぎると測定時に使うデバイスのメモリに限界があるため、すぐに限界値になってしまいました。
これにより、ショットを増やす結果となり後処理でショットの位置合わせが大変になります。
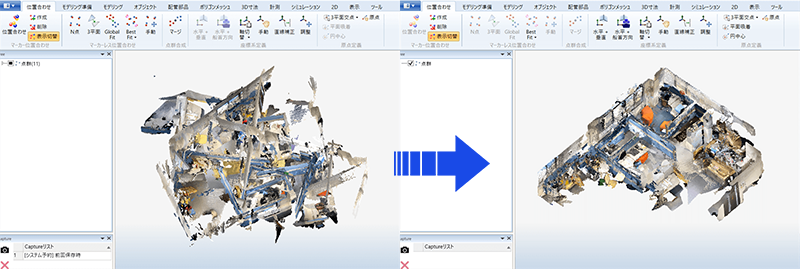
今回の検証では、点群数は少なすぎても多すぎても扱いづらく、適切な密度設定が重要であることが分かりました。
今回調査した項目の中でも、精度よく測定し、かつ点群データを効率的に活用するための、最も重要なポイントといえます。
具体的には、使うアプリによって基準が異なりますが、
Sakura 3D SCANでは、7m x 7m x 3mの部屋の場合=90~70%の密度、それ以上の範囲の場合=70~50%の密度にすると扱いやすい印象でした。
後工程での解析やモデリングを考えると、対象形状が連続して把握できる程度の点群密度が重要になります。
用途にもよりますが、形状全体が欠損なく取得できているかを一つの目安として、密度設定を調整することが現実的です。
まとめ
今回は、全部で3種類の項目で調査を行いました。
この時点での結論から言うと、iPhone/iPadのLiDARスキャナでの3D測定では….
- 対象と0.3m~5mの距離
- 屋内外問わず明るい場所
- 適度な点群密度
この3つのポイントに注意すると、なるべく使えるデータになることがわかりました。
今回の検証から、対象との距離や環境、点群密度の設定が、後工程で「使える点群」を得るための重要な要素であることが分かりました。次回(Part 2)では、『Sakura 3D SCAN』独自の機能を活用した精度向上の工夫について解説します。
投稿日:2021年9月1日
更新日:2026年1月29日

tag : LiDAR Sakura3D SCAN